Cuál es el error más caro que has cometido
Autor: José OlinPublicado: 2022-05-25
¿Cuál es el error más caro que has cometido?
En mi haber hay algunos candidatos. El primero que viene a mi mente es la vez que desbielé el motor de la camioneta, en una prueba del Isiukak que salió mal, y la reparación se llevó mis aguinaldos y un pelín de mis ahorros.
El hecho de que nadie saliera lastimado tuvo mucho más peso para mí, y siempre lo vi como una pequeña inversión a la causa de la autonomía. Además aquella tarde entendí que era de vital importancia poder detectar si algo se desconectaba y tomar medidas de seguridad al respecto. Sigo creyendo que aquella enseñanza me salió más bien barata.
Este mes he cometido un error que definitivamente se lleva el galardón del mes, y mantuvo el tablero de actividades en aparente estancamiento durante un par de semanas, pues estuvimos trabajando intensamente en corregirlo, pero era parte sólo de una tarea del sprint.
La primer tarea del sprint fue agregar una batería de respaldo, eso implicó agregar un controlador de carga: este muchacho.

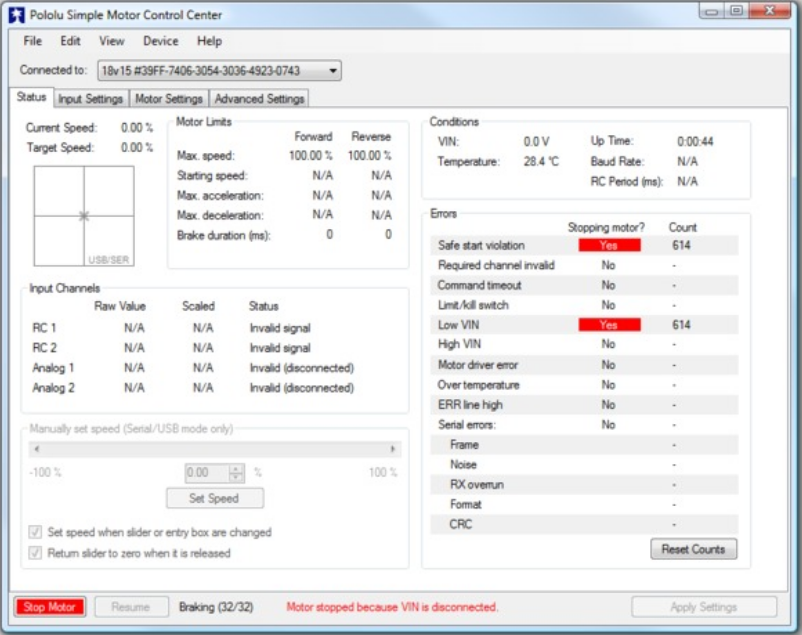
Las primeras veces que lo conectamos decía que el sistema estaba en corto y fuimos probando varios elementos del circuito para descartar cuál en particular estaba en corto.
Durante este proceso de descarte, me resultó claro que era necesario tener algunos drivers de respaldo, ya que de los 4 que utiliza el Isiukak, 3 son de Pololu y no tenemos respaldo para los mismos.
Así que pensé, en probar unos drivers viejos que teníamos en un cajón.
Lo ves venir, ¿cierto?
Tal vez no funcionarían completamente, o no para las pruebas en carretera, pero podría sacarnos de una apuro en las pruebas de laboratorio. Así que empecé a probarlos por USB, con la interfaz de Pololu.
Había uno en particular que incluso podía mover el motor conectado y pensé darle una probada en el Isiukak.
Cuando lo conecté la comunicación se detuvo, pero al quitarlo volvía a funcionar, así que lo reconecté un par de veces. No hubo comunicación y dejé el driver de nuevo en su cajón.
La siguiente sesión la comunicación serial se había ido. Podíamos hablarle al NUCLEO desde la computadora, pero el NUCLEO no le hablaba a los drivers (ni los escuchaba).
Resultó que el driver viejo que funcionaba por USB tenía un corto en el puerto serial y se cargó el puerto del NUCLEO. Dos de los drivers siguen funcionando completamente normal, aunque un tercero aunque tiene comunicación y controla el motor, perdió la capacidad de medir el voltaje de entrada. No sabemos si es una consecuencia del corto, (pues parece más algo en la etapa de potencia, no la etapa lógica) pero es muy probable.
El costo: $13.65 USD más envío y dos semanas completas de retraso en el sprint. Además tendremos que revisar el driver para ver si es posible cambiar el convertidor ADC que reporta el voltaje.
Nunca he hecho soldadura de superficie, aunque tenemos algo de equipo para ello y esta parece una señal de que es algo a lo que hay que invertirle tiempo el siguiente sprint.
Antes de conectar el nuevo NUCLEO (que aún está en camino), decidimos asegurarnos completamente que los drivers de Pololu funcionan a 3.3V, pues una de las hipótesis era que tal vez funcionaban a 5V y aunque habían funcionado por un tiempo terminaron por dañar el puerto del NUCLEO. Para esto construimos un osciloscopio de 5V con Arduino que les compartiremos en un próximo post.
Hasta aquí la historia de mi error más caro del mes. ¿Cuál ha sido el tuyo? No te limites al mes, déjalo salir, sabemos que te dio sabiduría.
Si la naturaleza del mismo hace inevitable contarlo en un post futuro, prometo proteger tu identidad ;)
Esta publicación es posible gracias a nuestros Patreons.