Cómo construir actuadores con motores a pasos y reductores impresos en 3D.
Autor: Brayam PaulPublicado: 2022-12-28
¿Estás construyendo algo exótico pero la fuerza del motor que tienes a mano no es suficiente? Siempre puedes imprimir un reductor en 3D y aumentar la fuerza. En este post veremos cómo hacerlo.

Introducción
El maquinado de engranes suele ser una de las partes más complejas al construir mecanismos, por lo que tener opciones imprimibles en 3D para el prototipado es una ventaja enorme.
En el video puedes ver parte de la construcción de uno de los actuadores que usamos en el brazo robótico Kolman.
Para la construcción del actuador utilizamos los reductores diseñados por LoboCNC publicados en Thingiverse.
LoboCNC comparte 3 versiones de sus reductores, que se diferencian según el paso de los engranes. El de mayor tamaño tiene un paso de 20, el mediano un paso de 30 y el más pequeño un paso de 40.
En este tutorial construiremos el reductor mediano, de paso 30.
Consideramos un actuador como la unión de un motor con un reductor que aumenta su fuerza efectiva.
NOTA: Si quieres construir todos los actuadores necesarios para el brazo robótico Kolman, después de leer la sección Construcción, revisa la sección Articulaciones del Kolman con los detalles de cada actuador.
Si usarás el actuador otra aplicación no necesitas las NOTAS para Actuador Pequeño y Grande que aparecen en la sección Construcción.
¡Comencemos!
Construcción
Materiales
- 1 motor a pasos Nema 17.
- Las siguientes piezas impresas en 3D
- bodyH30.STL
- bodyH30_base.STL
- Ring48H30.STL
- PlanetClusterH30.STL
- Sun15H30.STL
- Sun18H30.STL
- 8 Tornillos cónicos milimétricos M3.
- 4 Tuercas milimétricas M3.
- 26 Balines plásticos de airsoft de 6 milímetros.

NOTA: Se recomienda imprimir las piezas PlanetClusterH30.STL al 99% de su tamaño para facilitar montaje.
1. Colocación del eje
Para este paso necesitamos:
- Motor Nema 17.
- Pieza Sun15H30.
.jpeg)
Para colocar esta pieza basta con introducirla a presión en el eje del motor.

NOTA para Actuadores pequeños 1: Retirar previamente el eje dentado del motor Pm55l-048.
NOTA para Actuadores pequeños 2: Sun15H30 es reemplazada por Sun15H30_modificada. Puedes descargarla de nuestro repositorio en Github
2. Montaje de la base
Necesitaremos:
- El montaje anterior.
- La pieza bodyH30_base
- 4 Tornillos cónicos milimétricos M3.
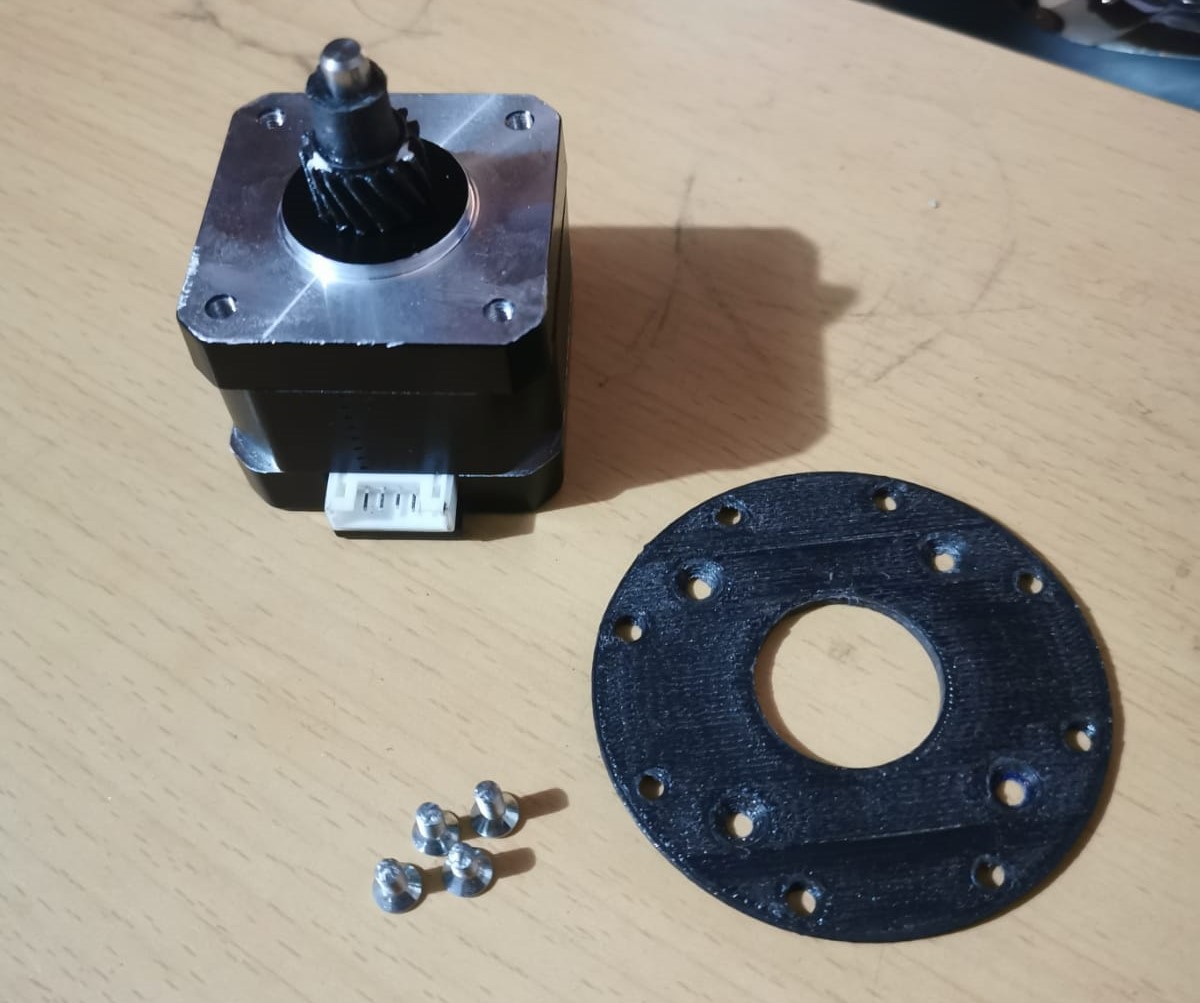
La pieza bodyH30_base tien una cara plana y otra con borde redondeado. El borde plano debe apuntar hacia arriba.
Alineamos el centro de la pieza con el eje del motor y lo ajustamos. Finalmente, alineamos los agujeros y fijamos utilizando los 4 tornillos cónicos en los agujeros.

NOTA Actuadores pequeños 3: bodyH30_base es reemplazada por bodyH30_base_modifcada.
NOTA Actuadores pequeños 4: Se deben alinear las aletas del motor Pm55l-048 con las de la base y unirse mediante 2 tornillos milimétricos del número 3.
3. Fijación del cuerpo al motor
Para este paso necesitamos:
- El montaje anterior.
- La pieza bodyH30.
- 4 Tornillos cónicos milimétricos M3.

La pieza bodyH30 se coloca encima de bodyH30_base, alineada con el centro del motor, como se ve en la imagen:
.jpeg)
Posteriormente alineamos los agujeros avellanados con los agujeros del motor y la fijamos utilizando los tornillos cónicos por la parte trasera del ensamble.

NOTA Actuadores grandes 1: En los pasos 2 y 3 usar la pieza body20.
4. Engranajes opresores
Para este paso necesitamos:
- El ensamble anterior.
- 3x PlanetClusterH30.

En la colocación de estas piezas, tanto la base como los planetas (PlanetClusterH30) cuentan con flechas guía.
Para colocar adecuadamente los planetas debemos alinear la flecha impresa en el mismo, con alguna de las 3 impresas en la base y posteriormente hacer encajar los dientes de ambos engranajes, este proceso debemos hacerlo con cada engrane planetario.

NOTA general: Considerar que los engranes son de tipo helicoidal, por lo que al montarlos pueden girar un poco y desalinearse ligeramente. Considéralo durante el montaje y ten paciencia ;).
5. Anillo interior
Para este paso necesitamos:
- El ensamble anterior.
- La pieza Sun18H30.

Para colocar esta pieza basta con alinear el centro del anillo con el eje circular del motor y hacer embonar los dientes de los engranes.

NOTA: Para hacer mas fácil la colocación, se recomienda indicar los centros de las piezas, como se muestra en la imagen.
NOTA: Se recomienda aplicar lubricante para engranes plásticos o vaselina.
6. Tapa
Para este paso necesitamos:
- La pieza Ring48H30.
- 4 Tuercas milimétricas M3.
Antes de finalizar, debemos colocar a la tapa del actuador algunas tuercas, las cuales nos ayudarán a fijar el actuador al componente que moverá.
Basta con colocar las tuercas en los espacios hexagonales internos de la pieza y fijarlas usando pegamento.
.jpeg)
NOTA Actuadores grandes: Las tuercas en ese caso son M4 en lugar de M3.
7. Montaje.
Para este paso necesitamos:
- La pieza Ring48H30 con tuercas.
- Ensamble montado hasta el paso 5.

Comenzamos alineando la tapa con el resto del actuador y consiguiendo que embonen. Al introducirse deberá girar un poco debido a los engranajes helicoidales.
Después debemos alinear las dos hendiduras circulares del actuador para el paso siguiente.

NOTA: Una forma de alinear las piezas es girando directamente el eje del motor a través del agujero central en la pieza Ring48H30.
8. Rodamientos.
Para este paso necesitamos:
- Actuador montado.
- 26 Balines plásticos de airsoft de 6 milímetros.

Una vez alineados el cuerpo y la tapa, debemos colocar, a través del pequeño agujero indicado en la imagen, los balines de plástico haciendo un poco de presión.
 Actuador con 1 balín colocado.
Actuador con 1 balín colocado.
 Actuador con varios balines colocados.
Actuador con varios balines colocados.
NOTA General: Es recomendable dejar un balín sin colocar para facilitar el desmontaje en caso de ser necesario.
NOTA Actuadores grandes: Requerirán algunos balines adicionales.
¡Tenemos un ensamblado y listo!

Articulaciones del Kolman
Nuestra motivación para construir los actuadores fue usarlos en un brazo robótico, el Kolman, que cuenta con 3 tipos de actuadores: grandes, medianos y pequeños;
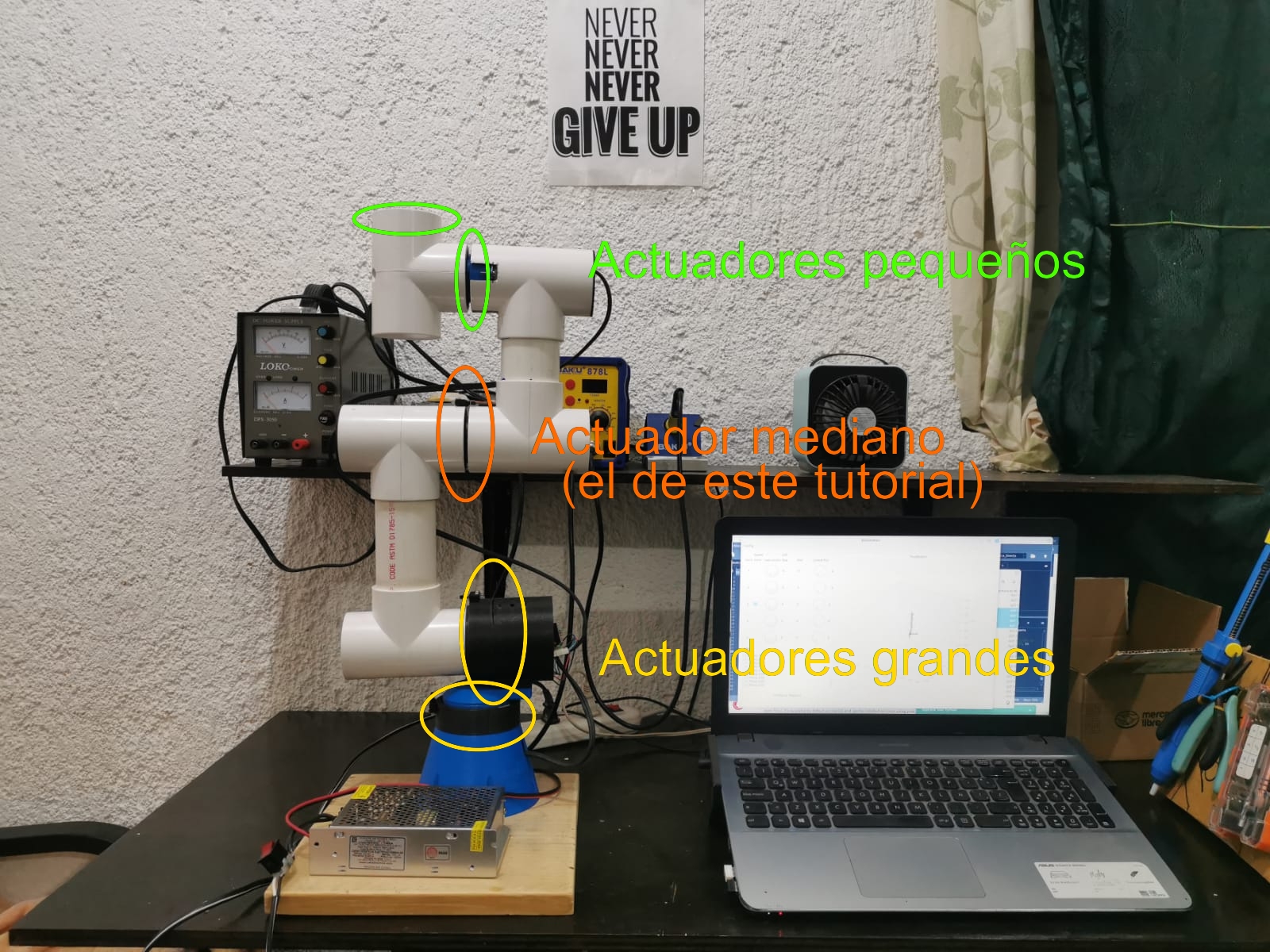
Usamos los reductores de 20 y 30 pasos, pero se tienen tres tipos de actuadores.
- Motor Nema 17 + Reductor Paso 20 = Actuador grande
- Motor Nema 17 + Reductor Paso 30 = Actuador mediano
- Motor Pm55l-048 + Reductor Paso 30 = Actuador pequeño
Los actuadores son muy semejantes, por lo que aunque la sección Construcción es acerca el actuador mediano, las instrucciones aplican para los tres, con las variaciones mencionadas en las notas y otras que se mencionan a continuación.
Actuadores Grandes
El Kolman requiere dos articulaciones de este tipo, en la base.
Se utiliza el reductor con engranes de 20 pasos:
- body20.STL
- Ring48_20p.STL
- PlanetCluster20.STL
- Sun15_20p.STL
- Sun18_20p:STL
- 4 Tornillos cónicos milimétricos M3 (Se atornillan al motor Nema 17).
- 4 Tuercas milimétricas M4 (para unir el actuador con el resto del brazo).
- 40 Balines plásticos de airsoft de 6 milímetros.
- 1 Motor a pasos Nema 17.
NOTA: Se recomienda imprimir la pieza PlanetCluster20.STL al 99% de su tamaño para facilitar montaje.
Actuador mediano
Se utiliza en la articulación central del brazo. Es el que se utiliza en este tutorial.
Actuador chico
Se utilizan dos en las las articulaciones del extremo. Usa el reductor de paso 30:

- bodyH30.STL
- Ring48H30.STL
- PlanetClusterH30.STL
- Sun18H30.STL
- bodyH30_base_modificada
- Sun15H30_modificada
- 4 tornillos cónicos milimétricos M3.
- 2 tornillos milimétricos M3 de cabeza normal.
- 4 tuercas milimétricas M3.
- 26 balines plásticos de airsoft de 6 milímetros.
- 1 motor a pasos Pm55l-048.
NOTA: Fue necesario modificar dos piezas (body y sun) para acoplarlas al motor Pm55l, que puedes descargar del repositorio en Github del Brazo Kolman.
NOTA: Se recomienda imprimir la pieza PlanetClusterH30.STL al 99% de su tamaño para facilitar montaje.
Conclusión
El maquinado de engranes suele ser una de las partes más complejas al construir mecanismos, por lo que tener opciones imprimibles en 3D es una ventaja enorme, sobre todo durante el prototipado.
Nuestro objetivo es buscar opciones para que los prototipos de Olin Robotics sean lo más fácilmente replicables y pueden llegar a más personas, y la impresión 3D ha demostrado ser una poderosa aliada.
¿En qué te gustaría usar estos actuadores? Platícanos en los comentarios.
Esta publicación es posible gracias a nuestros Patreons.